Abstract
In recent years, depth cameras have become a widely available sensor type that captures
depth images at real-time frame rates. Even though recent approaches have shown
that 3D pose estimation from monocular 2.5D depth images has become feasible, there
are still challenging problems due to strong noise in the depth data and self-occlusions
in the motions being captured. In this paper, we present an efficient and robust
pose estimation framework for tracking full-body motions from a single depth image
stream. Following a data-driven hybrid strategy that combines local optimization
with global retrieval techniques, we contribute several technical improvements that
lead to speed-ups of an order of magnitude compared to previous approaches. In particular,
we introduce a variant of Dijkstra’s algorithm to efficiently extract pose features
from the depth data and describe a novel late-fusion scheme based on an efficiently
computable sparse Hausdorff distance to combine local and global pose estimates.
Our experiments show that the combination of these techniques facilitates real-time
tracking with stable results even for fast and complex motions, making it applicable
to a wide range of interactive scenarios.
|
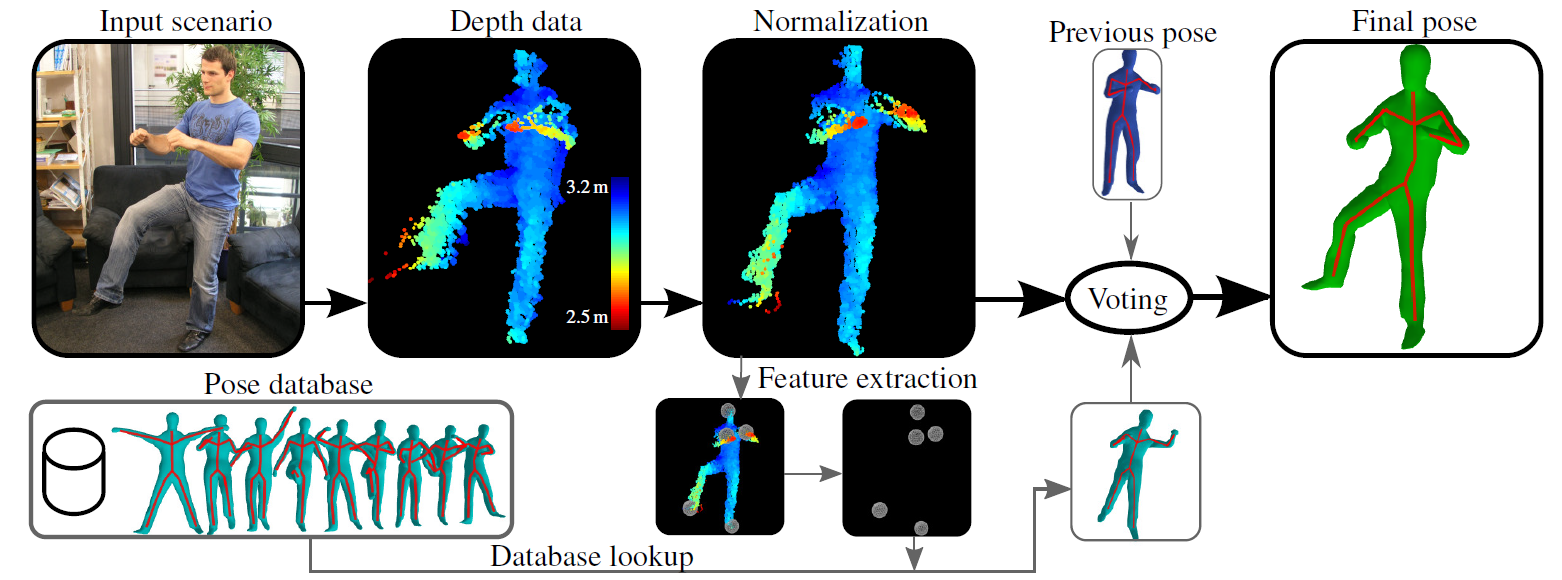 Overview of our proposed pose estimation framework.
Overview of our proposed pose estimation framework.