Abstract
Reconstructing a three-dimensional representation of
human motion in real-time constitutes an important re-
search topic with applications in sports sciences, human-
computer-interaction, and the movie industry. In this paper,
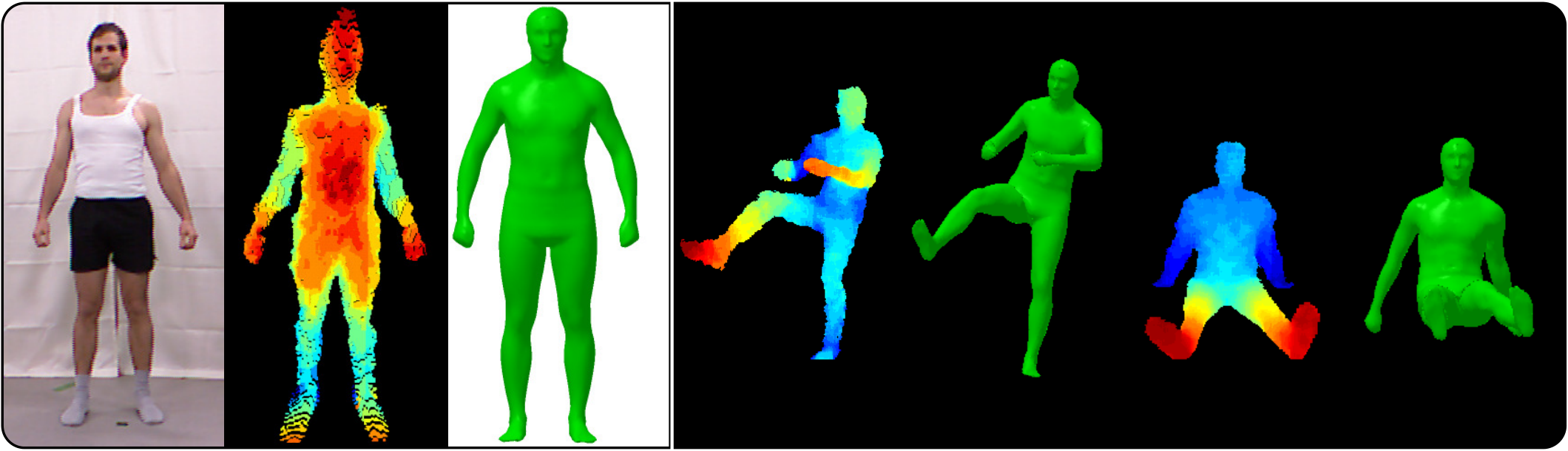
we contribute with a robust algorithm for estimating a
personalized human body model from just two sequentially
captured depth images that is more accurate and runs
an order of magnitude faster than the current state-of-
the-art procedure. Then, we employ the estimated body
model to track the pose in real-time from a stream of
depth images using a tracking algorithm that combines
local pose optimization and a stabilizing database look-
up. Together, this enables accurate pose tracking that is
more accurate than previous approaches. As a further
contribution, we evaluate and compare our algorithm to
previous work on a comprehensive benchmark dataset
containing more than 15 minutes of challenging motions.
This dataset comprises calibrated marker-based motion
capture data, depth data, as well as ground truth tracking
results and is publicly available for research purposes.
|